



Angesichts der Tatsache, wie leicht sich unsere Fahrzeuge heutzutage durch gewundene Straßen und enge Kurven manövrieren lassen, könnte man vermuten, dass sich kaum noch Verbesserungspotenzial für moderne Servo-Lenksysteme bietet. Die Ingenieure, die sich im Integrated Transport Research Lab (ITRL) der Königlich Technischen Hochschule (KTH) Stockholm mit dem Thema der sogenannten ?überakturierten“ Fahrzeugtechnologie befassen, sehen das jedoch ganz anders. Mit ihrer Arbeit wollen sie feststellen, ob und wie ein Austausch der herkömmlichen hydraulischen Lenktechnologie gegen kompakte elektromechanische Lösungen Vorteile in puncto Leistung, Kosten, Wartung, Nachhaltigkeit und Flexibilität einträgt.
Was ist an heutigen Lenksystemen falsch?
Die Servolenkung in den meisten aktuellen Fahrzeugen ist um eine große Lenksäule herumgebaut, die einen großen Teil der Fahrerseite einnimmt. Beim Drehen des Lenkrads wird Hydraulikflüssigkeit in Aktuatoren an der Vorderrad-Baugruppe geleitet wodurch die Räder auf den Kugelgelenken, über die sie mit der Aufhängung verbunden sind, nach links oder rechts schwenken. Diese Mimik funktioniert bis zu einem bestimmten Punkt zufriedenstellend, weist aber zahlreiche Einschränkungen auf.
Zum einen nimmt die Lenksäule relativ viel Platz ein und hat ein beträchtliches Gewicht für ein mechanisches System, dessen Wartung überdies kompliziert und kostenintensiv ist. Wird die Lenkanlage beispielsweise in einem Unfall beschädigt, addieren sich die Kosten für die Reparatur oder den Austausch zu einer beträchtlichen Ausgabe. Darüber hinaus erfordern hydraulische Systeme eine regelmäßige Wartung. Ebenso regelmäßig muss das Öl einer Servolenkung nachgefüllt werden, während mögliche Undichtigkeiten die Sicherheit gefährden, da sie das Lenkverhalten beeinträchtigen.
Auch die Energieeffizienz ist ein Problem, das untersucht wird: ?Das klassische Lenksystem erhält seine Leistung durch eine direkte Verbindung zum Motor. Im Leerlauf müssen die Systeme mit wenig Leistung auskommen, während bei hoher Drehzahl ein Überangebot an Leistung herrscht“, erklärt der Direktor des ITRL, Peter Georén, Experte auf dem Gebiet der Transport Innovationen. ?Der Entwicklungstrend geht in die Richtung, den Motor in erster Linie für den eigentlichen Fahrantrieb zu nutzen und weniger für die Subsysteme.“
Eine weitere Einschränkung des herkömmlichen Lenkgetriebes liegt in den Umstand, dass nur die Vorderräder gelenkt werden, und das mit einem begrenzten Einschlagwinkel. Aus diesem Grund kann das Einparken in eine enge Parklücke zur echten Herausforderung werden und erfordert die weithin gefürchtete Prozedur des rückwärts Einparkens. Obwohl einige neuere Fahrzeuge diesen Vorgang automatisch durchführen können, wäre es dennoch deutlich effizienter, wenn ein Fahrzeug senkrecht in eine Parklücke fahren könnte. Abgesehen vom Einparken ermöglichen mehrere separate Lenkaktuatoren zudem eine Steuerung des Fahrzeugs zugunsten eines angenehmeren, sichereren Fahrverhaltens mit weniger Schlingern und verbesserter Straßenlage.
Wenngleich derzeit nicht Teil des Lenksystems, ist die Einstellung des Radsturzes, d.h. die vertikale Ausrichtung der Räder in Bezug auf das Fahrzeug, eine Präzisionsarbeit mit Spezialausrüstung, wenn der Sturz durch ein Schlagloch oder einen heftigen Stoß verstellt wurde. Diese Einstellung könnte deutlich einfacher – sogar automatisch – erfolgen. Hier könnten Zeit und Geld eingespart, ein sanfteres Fahrverhalten mit weniger Reifenverschleiß erreicht oder bei Bedarf der laterale Kraftschluss erhöht werden, um die Fahrsicherheit zu verbessern.
Tausche Verrohrung gegen Kabel
Die Initiativen zur elektronischen Lenkung (Stichwort ?Steer-by- Wire“) sind Teil eines umfangreichen Fragenkatalogs zum umweltschonenden und nachhaltigen Transport, mit dem sich die KTH und das ITRL derzeit beschäftigen. Das ITRL führt seine Tests an einem 400 kg schweren Konzeptfahrzeug (KF) durch, das zwei Personen transportieren und eine Geschwindigkeit von 70 km/h erreichen kann. Abbildung 1.

Abbildung 1 – Lenkbaugruppe, Foto: Matthias Tidlund.
An jedem Rad des KF befindet sich eine Lenkvorrichtung, die von einem Linearaktuator betätigt wird. Während in herkömmlichen Systemen ein Druckmedium über Hydraulikleitungen die Lenkkraft liefert, ersetzen im KF des ITRL Stromkabel die Hydraulikleitungen und aktivieren einen kleinen, im Aktuatorgehäuse untergebrachten Motor. Die Fahrer steuern die elektrischen Signale zwar über ein Lenkrad, aber das funktioniert ähnlich wie beim Controller eines Videospiels anstelle des klassischen Rohrleitungssystems.
Um das System für die Tests der überakturierten Technologie auszustatten, entschied sich das ITRL-Team für acht Aktuatoren: je einen an jedem Rad für die Lenkung und einen zweiten für die Radsturz-Verstellung. Die Suche nach dem passenden Aktuatormodell gestaltete sich schwieriger als gedacht. Die Forscher ließen ihre Spezifikationen verschiedenen Herstellern zukommen, von denen die meisten jedoch entweder eine höhere Spannung oder Wechselstrom benötigten. Nur Thomson Industries war es möglich, die Vorgaben exakt und wie gewünscht einzuhalten. Für die Lenkfunktionen lieferte Thomson vier Hochgeschwindigkeits-Aktuatoren des Typs Max Jac MX24-B8M10E0; vier Modelle der Pro-Serie waren zur Verstellung der Radneigung vorgesehen.
Wie zu erwarten war, zeigten die neuen elektrischen Linearaktuaren angesichts der Geschwindigkeit, mit der Strom sich im Kabel fortbewegt, ein deutlich höheres Ansprechverhalten als die hydraulischen Aktuatoren. Darüber hinaus bot die digitale Ansteuerung in Verbindung mit der speziell konstruierten Lenkarchitektur ein Maß an Flexibilität, das mit herkömmlicher Aktorik nicht realisierbar ist. Es ist genau diese Fähigkeit, die beispielsweise das rückwärts Einparken durch senkrechtes Einparken ersetzen kann oder eines Tages eine automatische Sturzeinstellung während des Fahrens ermöglicht, die den Rollwiderstand reduziert oder den korrekten Sturz nach einem Schlagloch wiederherstellt.
Feuerprobe im wahrsten Wortsinn
Zu den Testszenarien gehörten das Fahren bei voller Beladung sowie lange Kurvenfahrten. Das Lenken im Stehen belastet das System deutlich stärker als im Fahren, und es dauerte nicht lange, bis der Betrieb an den Grenzen der Systembelastbarkeit seinen Tribut forderte. Die Wicklungen der Aktuatormotoren überhitzten und fingen sogar Feuer.
Der Einsatz anderer Aktuatoren kam nicht in Frage, da bereits feststand, dass nur die Thomson- Aktuatoren die erforderlichen Leistungsspezifikationen erfüllen konnten. Also verlagerte sich die Aufmerksamkeit auf den in den Aktuatoren verbauten Standardmotor, der offensichtlich nicht für derart extreme Bedingungen wie in diesem Test ausgelegt war. Georén und sein Team beschlossen zu testen, ob ein anders gewickelter Motor die erforderliche Leistung ohne Überhitzung liefern könnte.
Motoren im Vergleich
Die Tests wurden in einer einzigartigen Zusammenarbeit zwischen dem KTH-Mitarbeiter Bruno Verde und den Ingenieuren von Thomson durchgeführt. Sie untersuchten verschiedene Motor- Alternativen auf geometrische und elektrische Randbedingungen, die einen Dauerbetrieb bei höheren Kräften erlauben würden. Zu den Auswahlkriterien gehörten das für eine bestimmte Kraftausgabe erforderliche Eingangsdrehmoment, Motor-Erwärmungseigenschaften sowie die Kompatibilität mit der aktuellen Montagekonfiguration.
Abbildung 2 zeigt die Ergebnisse des Motors, der aufgrund seiner kompatiblen Baugröße, seines höheren Drehmoments und seiner thermischen Eigenschaften gewählt wurde, die wiederum aus einem geringeren Wicklungswiderstand und einer hohen Fertigungsqualität resultieren.
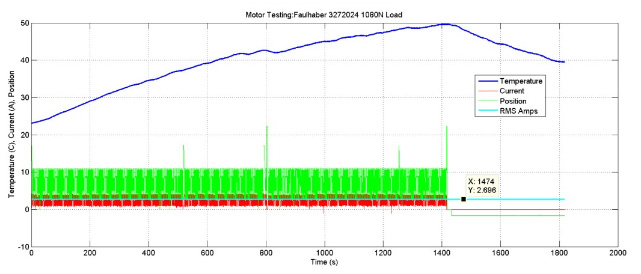
Abbildung 2: Testergebnisse des neuen Motors.
Unter einer Last von 1080 N benötigte der neue Motor nur 2,8 A, um das geforderte Drehmoment zu liefern, sodass er auch im Dauerbetrieb deutlich innerhalb seiner thermischen Grenzen blieb. Nach knapp 1000 Sekunden wurden am Motorgehäuse gerade einmal 45 °C gemessen, und es waren keine Anzeichen von Überhitzung zu erkennen. Nach 23 Minuten stieg die Temperatur auf 50 °C an, nach wie vor ohne Überhitzung. Verde errechnete, dass sich die Motorwicklung auf eine Temperatur von 80 °C einpendeln würde, wenn er dauerhaft 2,7 A aufnimmt, ein Wert deutlich innerhalb der Grenzwerte des Motors. Damit war die Machbarkeit der Nutzung eines Alternativmotors für die elektronische Lenkung nachgewiesen.
Vom Labor auf die Straße
Der alternative Motor konnte nicht einfach den Standardmotor ersetzen, da drei neue Bohrungen vorgesehen werden mussten. Außerdem mussten neue Ritzel bestellt und bearbeitet werden, um sie an die Wellendurchmesser der neuen Motoren anzupassen.
Der auf diese Weise modifizierte Aktuator wurde in eine Ecke des Wagens montiert, um die statische Lenkleistung mittels Testzyklus und Controller zu überprüfen. Die Teams testeten das Fahrzeug zunächst ohne Insassen, dann mit einer und schließlich mit zwei Personen. Wie die nachfolgende Abbildung zeigt, verbrauchten die Aktuatoren mit zwei Insassen 1,5 A Effektivstrom, was in etwa einer Ausgangskraft von 600 N im Aktuator entspricht und mit diesem Motor eine Einschaltdauer von 100 % erlaubt.
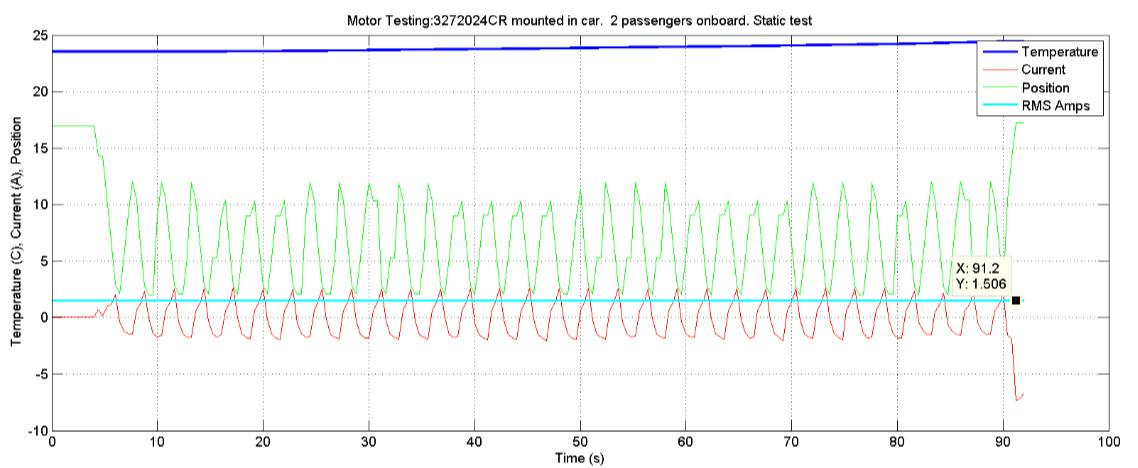
Abbildung 3: Ergebnisse mit zwei Insassen.
Anschließend wurde der Motor an den Lenkcontroller des Konzeptfahrzeugs angeschlossen, um seine Leistungsfähigkeit innerhalb des Gesamtsystems zu testen. Durch den stärkeren Motor konnte der Einschlagwinkel um ca. fünf Grad vergrößert werden.
Blick in die Zukunft
Die Modifizierung des Aktuators ergab ein extrem dynamisches System, das die nach oben korrigierten Leistungsziele erfüllte und ohne die Gefahr einer Überhitzung die zweifache Verstellkraft seines Vorgängers sowie ein höheres Ansprechverhalten lieferte. Die Forscher waren der Auffassung, das sogar kürzere Spitzen noch höherer Kräfte (z.B. 200 N bei 5 A) möglich wären. Dazu müssten jedoch umfangreichere Tests und Analysen des Systems erfolgen, um dessen mechanische Grenzen zu ermitteln.
Georén prognostizierte: ?Es kann noch fünf Jahre dauern, bis die Technologie der elektronischen Lenkung tatsächlich auf der Straße zum Einsatz kommt. Die ersten Anwendungen werden vermutlich eher im industriellen Bereich zu erwarten sein, wo es auf hohe Wendigkeit ankommt beispielsweise in Gabelstaplern und Transportfahrzeugen.“ ?Nichtsdestoweniger hatten Thomson-Aktuatoren ihren Anteil am Erreichen eines wichtigen Meilensteins.
Viele Unternehmen reden darüber, mit Studenten und Forschungseinrichtungen zusammenzuarbeiten, aber nur wenige setzen diese Absichten auch in die Tat um. Thomson kann zuRecht stolz sein: sie haben die Kompetenz Vieler gebündelt, um ein wirklich großartiges Produkt zu entwickeln.“
Weitere Informationen zu den in dieser Fallstudie genannten Thomson-Produkten Max Jac® Schwerlast-Linearaktuatoren und Linearaktuatoren der Baureihe Electrak Pro finden Sie unter nachfolgenden Links:
Max Jac Aktuatoren: http://www.thomsonlinear.com/website/deu‘/deu/products/actuators/maxjac.php
Electrak Pro Linearaktuatoren: http://www.thomsonlinear.com/website/deu/deu/products/actuators/electrak_pro.php
Bildunterschriften:

Thomson konnte dank einzigartiger Zusammenarbeit und speziell angepasster Produkte die Anforderungen des Projektes erfüllen. Zu sehen sind KTH-Präsident Peter Gudmundson und Matthias Tidlund beim ersten Test des Konzeptfahrzeugs. Foto mit freundlicher Genehmigung von Matthias Tidlund.

Das Design des Thomson Max Jac ® Linearaktuators liefert gleichermaßen hohe Langlebigkeit und Leistung – für maximale Verstellgeschwindigkeit, Effizienz und Präzision bei kompakten Abmessungen. Foto mit freundlicher Genehmigung von Matthias Tidlund.

Der Max Jac ® Linearaktuator wurde für den Einsatz unter rauen Umgebungseinflüssen konzipiert, z.B. Düngemittel, Schlamm, Sand, Hochdruck-Strahlwasser, Schneematsch, Salzwasser, Schnee, Hitze oder starke Vibrationen. Foto mit freundlicher Genehmigung des ITRL.

Der durch Thomson modifizierte Aktuator ergab ein extrem dynamisches System, das ohne die Gefahr einer Überhitzung die zweifache Verstellkraft seines Vorgängers und ein höheres Ansprechverhalten lieferte.